This project introduces a system that provides a dynamic table-scale haptic feedback for virtual reality, by using a robot that can move one mug on the table to map three virtual mugs in virtual reality.
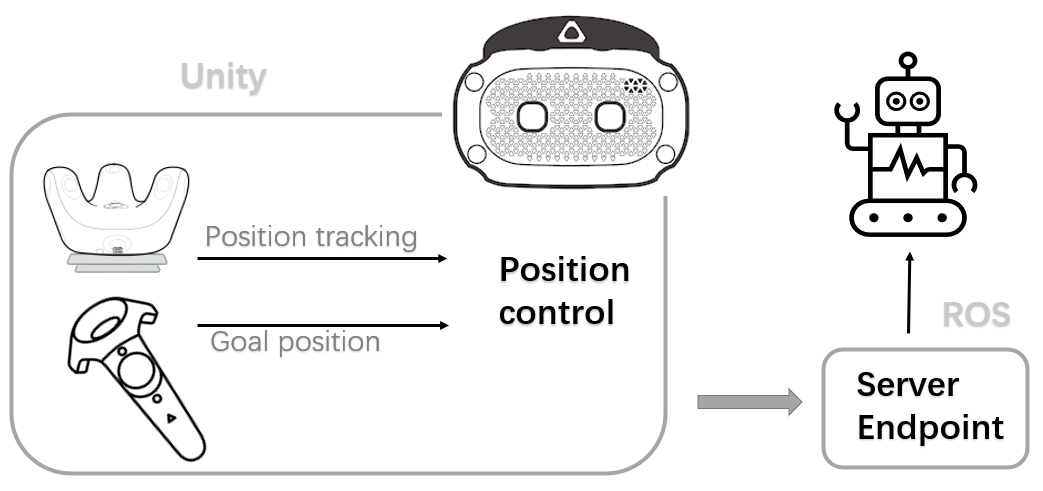
An accurate tracking system is essential for tracking objects in this project. A headset mounted display (HMD), two controllers, two lighthouse BASE stations, and two VIVE
trackers 2.0 made up the setup of the Vive System.
![]()
By synchronizing information from the real and virtual worlds and giving commands to the robot, users can touch and lift objects in virtual content with their hands carrying the controller. When the user gives a demand to touch a specific mug, the robot is activated to reconfigure the real world.
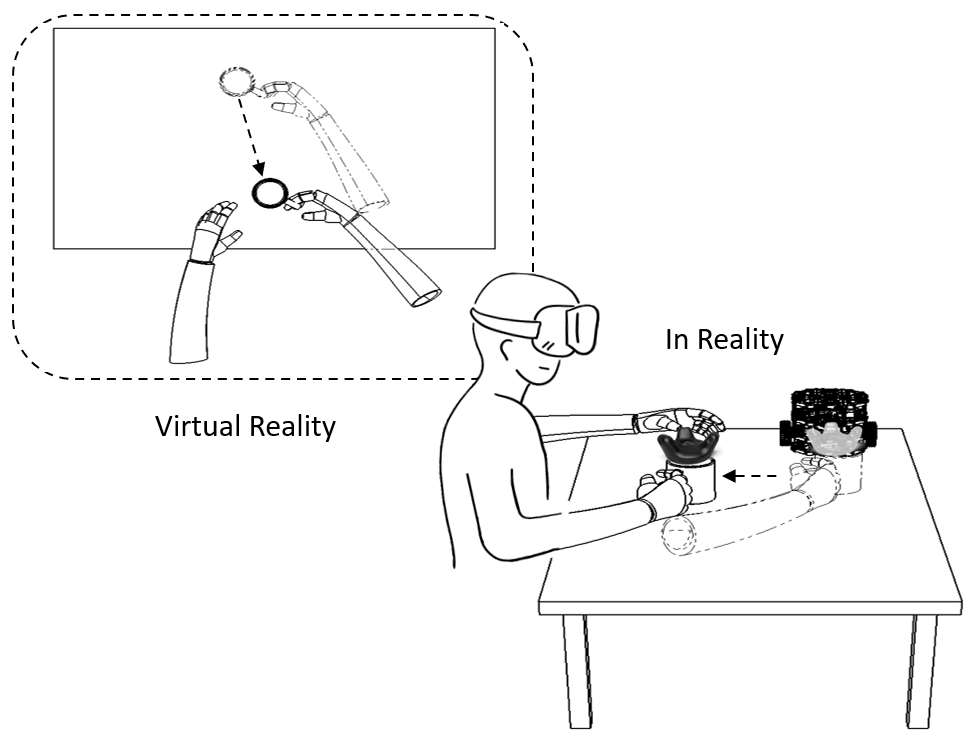 Similarly, virtual contents also changes along with operation conducted to the real mug (such as moving it or lifting it by the user) to achieve a sense of reality.
Similarly, virtual contents also changes along with operation conducted to the real mug (such as moving it or lifting it by the user) to achieve a sense of reality.
